Project Get A Grip

Meet the Team

Our mutlidisciplinary team was made up of two biomedical engineers, one mechanical engineer,
and one civil engineer.
Throughout the project, I served as the Technical Engineering Design Lead, and primary researcher regarding available and feasible technologies to incorporate into our solution.
Design criteria
Solution Requirements
- The device will be easy to use
- The device must be lightweight (less than 2 pounds)
- The device will accommodate for the subject’s limited range of motion and strength
- The device should not require more than 1 lb. of input force
- The device should be able to pick up an object weighing less than 5 lbs.
- The device must be able to be used independently
- The device must be able to be cleaned
- The combined set up and use time must be less than the time it currently takes to perform the action
Initial Brainstorming
Existing Solutions

Research was conducted to assess current assistive devices for those with physical limitations. Devices analyzed ranged from generic grip and reach tools, to specialized devices intended to be used for eating (such as the Winsford Feeder, pictured above), bathing and hygiene, and dressing.
Assessment of User Abilities

Upon completion of initial research, a quantitative assessment of the user's abilities, strengths, and weaknesses was performed. Testing criteria was used and weighted according to level of importance from the user, the user's family and her physical therapist. In addition, observations were conducted to determine a typical day in the user's life.
Testing & Prototyping
Prototype Assemby

Potential solutions were scored against the weighted design criteria to narrow down the possibilities and determine the best ideas to move forward with. Initial scoring results led us to start with a three prong clamping mechanism to pick up objects powered by a pulley mechanism. A quick and low cost prototype was built and assembled to be able to test with the user.
User Testing

The initial prototype was fabricated primarily out of wood, fishing wire, and duct tape in order to test our initial concepts. A slide switch control was used to open and close the three prong gripper. As the switch is pushed and pulled, the gripper opens and closes respectively as it passes through a small funnel. The switch was connected to the gripper via fishing wire around a mock-pulley system.
Difficulty of use led to the need for an additional brainstorming session. This produced the ideas of creating a motorized model in addition to making improvements to the purely mechanical model.
Design Iteration

Our second prototype was made of plastic tubing, which served to encase all mechanisms used. The mechanical prototype is similar to the first prototype, but with less friction due to Teflon coated wire and greater grasping ability through an aluminum gripper. A slide switch is still in place to control the gripper, but with a more efficient design. A flexible shoulder to more easily adjust the position of the device was also added.
Solution refinement

Creating a Motorized Prototype
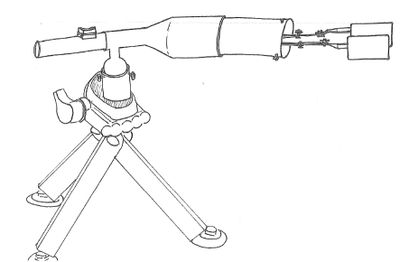
Additional ideation resulted in the creation of a switch-controlled motorized model made of lightweight plastic tubing, and a two-prong aluminum gripper. This motorized prototype utilized a push switch connected to a linear motor that was powered by a 6V battery to extend and retract the gripper. The design was also mounted onto a tripod for range of motion and control.
Design Customization
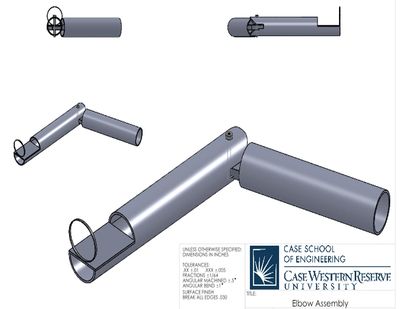
Additional testing and observation sessions with the user revealed the need for further customization and refinement. Specialized parts were designed in Solidworks and 3D printed for enhanced function and durability.
Primary modifications improved:
- Center of mass and usability
- Mobility through the design and creation of a ball and socket joint
- Increased stability by incorporating added weight and plastic supports to the base of the stand
- Gripping ability by refining the angles and mechanism to control the two-prong clamp
Final Solution

Project Get A Grip Successfully Meets User Needs
The final device enabled the user to conduct a variety of daily activities. Some of the most notable achievements were:
- Device was able to reach shoulder and mouth easily
- Small objects were picked up in two tries or less
- Objects weighing 2 lbs or less were able to be locked into place, facilitating eating
- Washcloth can be lifted to user's face for cleaning
- Clothes can be gripped and tugged on to assist with dressing
- Setup of the device takes less than one minute
- Device is lightweight, portable, and safe
Special Thanks to Breanna Sprenger

For inspiring us throughout this engagement with your positivity, vibrant energy, and incredible optimism. Thank you for all of your effort, input, and patience. #TeamBre